





FOG Photonics®INS8000 Ring Laser Gyro - Positioning Sensor

In order to meet more applications,This device accept the external sensors such like Milemeter /DVL/Barometric altimeter.Multi sensors(Milemeter /DVL/Barometric altimeter) integrated into our INS8000 system,it guarantees this system with the high accuracy output fora long time.The INS8000 Systems have an excellent performance in application like Compass for vessels and high precision positioning and orientation(POS) application.
About Ring Laser Gyro Technology

Optical technologies RLG & FOG sensing technologies form the basis of many of our motion sensors. Their role is to measure the rotation of a device in free space. Both technologies use a phase interferometry to achieve these rotational measurements. The RLG or the FOGs are arranged in a group of 3, and complimented with 3 matched accelerometers, to form a 6 Degree Of Freedom (DOF) inertial measurement unit (IMU).
RLG technology The monolithic RLGs used by FOG photonics are extremely stable over a range of temperatures and are available in 2 performance grades. A wide range of products, from the MiniRLG to the INS8000 are available with this technology. They are also available as positioning solutions, as they have embedded inertial navigation algorithms. When supplied with a DVL, the system can use the data from the DVL directly to aid the solution. Where most other technologies would have a hard time operating, RLGs are able to perform under adverse environmental conditions.
Product Features
Product hinglights
|
Military grade device |
|
Autonomous Navigation |
|
Self seeking north |
|
Good compatibility |
|
Compass function |
|
Low noise, high update rate Solution(High bandwidth) |
|
Support storage |
|
Excellent scalability |
|
Flexible configuration protocol |
|
Waterproof and dust proof |
|
Customizable selection |





Technical Specification
System accuracy |
|||
Self seeking north |
0.06SecL(1σ) |
||
Attitude accuracy |
0.01°(1σ) |
||
Totally inertial navigation accuracy |
1nmile/hr(CEP) |
||
GNSS Group Horizontal positioning accuracy |
single-point L1/L2:1.2m(1σ) |
||
GNSS Group speed accuracy |
0.02m/s(1σ) |
||
Combined Odometer Positioning precision |
0.1%Mileage (depending on the external odometry accuracy) |
||
The Accuracy of heavy movement |
5cm or 1% |
||
Start time |
≤10s |
||
Self seeking time |
<5min |
||
Measuring range |
|||
Azimuth measuring range |
0° - 360° |
||
Pitch angle measuring range |
±90° |
||
Rolling angle measuring range |
±180° |
||
Angular rate |
±300°/s |
||
Acceleration |
±10g |
||
Latitude |
±85° |
||
Main device performance |
|||
Gyro |
Type |
Ring laser gyro |
|
Measuring Range |
±300°/s |
||
Bias stability |
0.008°/hr |
||
Accelerometer |
Measuring Range |
±10g |
|
Bias stability |
≤10ug |
||
Data interface |
|||
COM |
2 channels(RS232/RS422 Customizable configuration)、1channel RS232 |
||
CAN2.0b |
1 channel |
||
LAN |
1channel |
||
Pulse |
1 way differential signal、2 ways of Single-Ended |
||
Auxiliary sensors |
Milemeter /DVL/Barometric altimeter interface |
||
Storage capacity |
16GB(CUSTOMIZE) |
||
Data update rate |
200Hz(Customize) |
||
Power Requirements |
|||
Voltage |
24V DC Rated(18-36V DC) |
||
Power consumption |
≤30W |
||
Physical characteristics |
|||
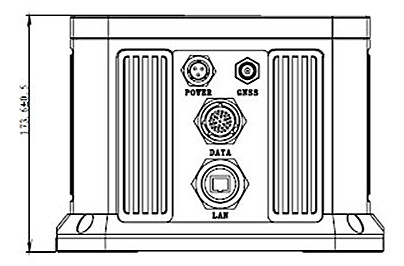
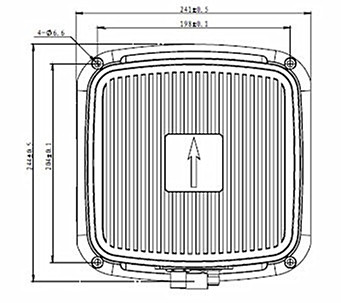
Dimension |
240mm×240mm×173mm |
||
Weight |
≤10kg |
||
Environmental characteristics |
|||
Vibration |
20~500Hz、Vibration acceleration:5g |
||
Impact |
15g |
||
Operating temperature |
-40°C - +71°C |
||
INGRESS PROTECTION |
IP67 |
||
MTBF |
2000h |
||
Optional accessories |
|||
Mileage meter Kit |
Doppler speed radar / wheel speed sensor |
||
Barometric altimeter Kit |
10~1200Hpa,Resolution 0.1Hpa,Height measurement accuracy10m(Max) |
||
RTK Differential radio |
radio modem 433 MHz /900MHz/2.4GHz |
||
Navigation post processing software |
The processing results can reach level requirements of Surveying and mapping |
||
Applications
|
Land field |
Unmanned aerial vehicle |
High dynamic range |
| Air field |
Intelligent unmanned vehicle |
High-accuracy Inertial Measurement
Unit(Miltary Grade) After surveying and mapping navigation processing
function |
| Sea field |
Hydrological survey |
0.06°self seeking north of ship heavy movement |
| Underwater field |
Underwater vehicle |
SFE the multi-sensor data fusion technology
DVL/UBSL |
Dimensions

Related Products



© FOGphotonics, inc. | Company | Products | Technoloy | Contact us